更换数据库这个事儿,是一个非常大的技术挑战,因为我们需要保证整个迁移过程中,既不能长时间停服,也不能丢数据。
实际上,无论是新版本的程序,还是新的数据库,即使我们做了严格的验证测试,做了高可用方案,刚刚上线的系统,它的稳定性总是没有那么好的,需要一个磨合的过程,才能逐步达到一个稳定的状态,这是一个客观规律。这个过程中一旦出现故障,如果不能及时恢复,造成的损失往往是我们承担不起的。
所以我们在设计迁移方案的时候,一定要做到,每一步都是可逆的。要保证,每执行一个步骤后,一旦出现问题,能快速地回滚到上一个步骤。这是很多同学在设计这种升级类技术方案的时候,容易忽略的问题。
第一步-复制旧库数据
首先要做的就是,把旧库的数据复制到新库中。对于大规模数据可以使用自增字段(自增主键/创建时间)作为复制的区间,在业务低谷期分批复制数据到新库中。
第二步-同步数据
因为旧库还在服务线上业务,所以不断会有数据写入旧库,我们不仅要往新库复制数据,还要保证新旧两个库的数据是实时同步的。所以,我们需要用一个同步程序来实现新旧两个数据库实时同步。
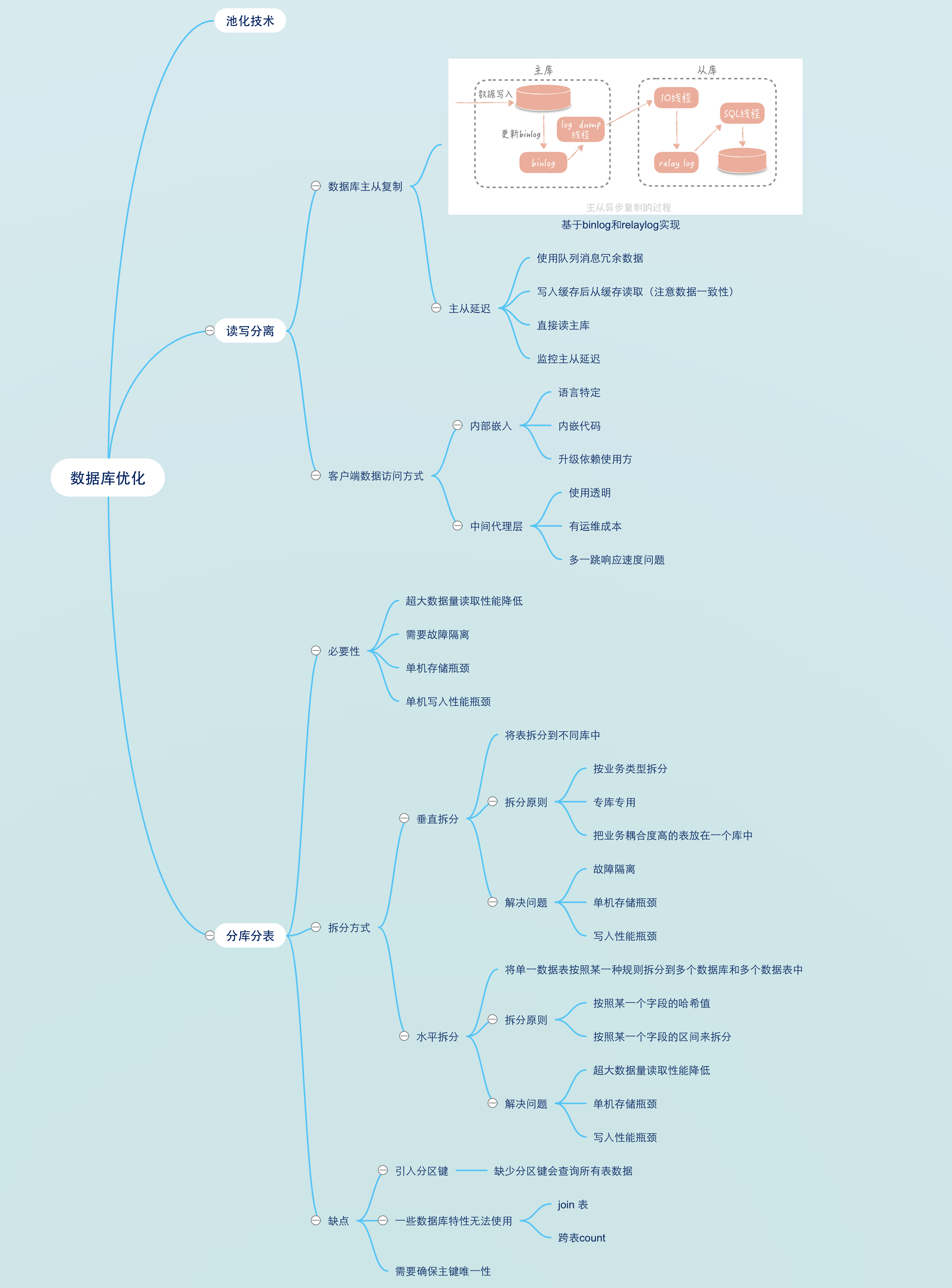
我们可以使用 Binlog 实时同步数据。如果源库不是 MySQL 的话,就麻烦一点儿,但也可以参考复制状态机理论来实现。这一步不需要回滚,原因是,只增加了一个新库和一个同步程序,对系统的旧库和程序都没有任何改变。即使新上线的同步程序影响到了旧库,只要停掉同步程序就可以了。
第三步-双写
然后,我们需要改造一下业务,业务逻辑部分不需要变,DAO 层需要做如下改造:
- 支持双写新旧两个库,并且预留热切换开关,能通过开关控制三种写状态:只写旧库、只写新库和同步双写。
- 支持读新旧两个库,同样预留热切换开关,控制读旧库还是新库。
然后上线新版的业务服务,这个时候业务服务仍然是只读写旧库,不读写新库。让这个新版的服务需要稳定运行至少一到二周的时间,期间除了验证新版服务的稳定性以外,还要验证新旧两个库中的数据是否是一致的。这个过程中,如果新版服务有问题,可以立即下线新版服务,回滚到旧版本的服务。
稳定一段时间之后,就可以开启服务的双写开关了。开启双写开关的同时,需要停掉同步程序。这里面有一个问题需要注意一下,就是这个双写的业务逻辑,一定是先写旧库,再写新库,并且以写旧库的结果为准。旧库写成功,新库写失败,返回写成功,但这个时候要记录日志,后续我们会用到这个日志来验证新库是否还有问题。旧库写失败,直接返回失败,就不写新库了。这么做的原因是,不能让新库影响到现有业务的可用性和数据准确性。上面这个过程如果出现问题,可以关闭双写,回滚到只读写旧库的状态。
第四步-对比补偿
切换到双写之后,新库与旧库的数据可能会存在不一致的情况,原因有两个:一是停止同步程序和开启双写,这两个过程很难做到无缝衔接,二是双写的策略也不保证新旧库强一致,这时候我们需要上线一个对比和补偿的程序,这个程序对比旧库最近的数据变更,然后检查新库中的数据是否一致,如果不一致,还要进行补偿。
开启双写后,还需要至少稳定运行至少几周的时间,并且期间我们要不断地检查,确保不能有旧库写成功,新库写失败的情况出现。对比程序也没有发现新旧两个库的数据有不一致的情况,这个时候,我们就可以认为,新旧两个库的数据是一直保持同步的。
第五步-流量切换
接下来就可以用类似灰度发布的方式,把读请求一点儿一点儿地切到新库上。同样,期间如果出问题的话,可以再切回旧库。全部读请求都切换到新库上之后,这个时候其实读写请求就已经都切换到新库上了,实际的切换已经完成了,但还有后续的收尾步骤。
第六步-下线历史逻辑
再稳定一段时间之后,就可以停掉对比程序,把服务的写状态改为只写新库。到这里,旧库就可以下线了。注意,整个迁移过程中,只有这个步骤是不可逆的。但是,这步的主要操作就是摘掉已经不再使用的旧库,对于在用的新库并没有什么改变,实际出问题的可能性已经非常小了。
到这里,我们就完成了在线更换数据库的全部流程。双写版本的服务也就完成了它的历史使命,可以在下一次升级服务版本的时候,下线双写功能。
如何实现对比和补偿程序?
在上面的整个切换过程中,如何实现这个对比和补偿程序,是整个这个切换设计方案中的一个难点。这个对比和补偿程序的难度在于,我们要对比的是两个都在随时变换的数据库中的数据。这种情况下,我们没有类似复制状态机这样理论上严谨实际操作还很简单的方法,来实现对比和补偿。但还是可以根据业务数据的实际情况,来针对性地实现对比和补偿,经过一段时间,把新旧两个数据库的差异,逐渐收敛到一致。
像订单这类时效性强的数据,是比较好对比和补偿的。因为订单一旦完成之后,就几乎不会再变了,那我们的对比和补偿程序,就可以依据订单完成时间,每次只对比这个时间窗口内完成的订单。补偿的逻辑也很简单,发现不一致的情况后,直接用旧库的订单数据覆盖新库的订单数据就可以了。
这样,切换双写期间,少量不一致的订单数据,等到订单完成之后,会被补偿程序修正。后续只要不是双写的时候,新库频繁写入失败,就可以保证两个库的数据完全一致。
比较麻烦的是更一般的情况,比如像商品信息这类数据,随时都有可能会变化。如果说数据上有更新时间,那我们的对比程序可以利用这个更新时间,每次在旧库取一个更新时间窗口内的数据,去新库上找相同主键的数据进行对比,发现数据不一致,还要对比一下更新时间。如果新库数据的更新时间晚于旧库数据,那可能是对比期间数据发生了变化,这种情况暂时不要补偿,放到下个时间窗口去继续对比。另外,时间窗口的结束时间,不要选取当前时间,而是要比当前时间早一点儿,比如 1 分钟前,避免去对比正在写入的数据。如果数据连时间戳也没有,那只能去旧库读取 Binlog,获取数据变化,然后去新库对比和补偿。
有一点需要说明的是,上面这些方法,如果严格推敲,都不是百分之百严谨的,都不能保证在任何情况下,经过对比和补偿后,新库的数据和旧库就是完全一样的。但是,在大多数情况下,这些实践方法还是可以有效地收敛新旧两个库的数据差异,你可以酌情采用。
小结
设计在线切换数据库的技术方案,首先要保证安全性,确保每一个步骤一旦失败,都可以快速回滚。此外,还要确保迁移过程中不丢数据,这主要是依靠实时同步程序和对比补偿程序来实现。
我把这个复杂的切换过程的要点,按照顺序总结成下面这个列表:
- 上线同步程序,从旧库中复制数据到新库中,并实时保持同步;
- 上线双写服务,只读写旧库;
- 开启双写,同时停止同步程序;
- 开启对比和补偿程序,确保新旧数据库数据完全一样;
- 逐步切量读请求到新库上;
- 下线对比补偿程序,关闭双写,读写都切换到新库上;
- 下线旧库和服务的双写功能。






![[片段] 方法参数收集](https://i.loli.net/2020/03/27/DKo1cSZmtew2sTP.jpg)